Autoguiado
James (Jim) R. McMillan
valueware@msn.com
Original: 6/21/2004
Updated: 2/10/2005, 11/17/2005
Existen muchos textos en la web que explican la mecánica del autoguiado: los materiales necesarios, las configuraciones posibles y los programas adecuados. También hay instrucciones maravillosas de los distintos programas. Sin embargo este es el único artículo que he leído que habla de los porqués y así explica los cómos. Me ha parecido estupendo. Lo traduje para entenderlo mejor, y pienso que es imprescindible para autoguiar con conocimiento de causa. Publicamos la traducción con permiso del autor. El original en inglés se encuentra en http://www.astroasheville.org/AutoguidingMcMillian11-2005.pdf
José M. López Arlandis – Agrupación Astronómica de Alcoy (Astroalcoy)
Puede descargar este documento en pdf aquí
———————————————————————————————————-
A menudo se piensa que el autoguiado es un arte oscuro cuyo funcionamiento correcto depende de la suerte y de un poco de magia. Así es exactamente como comencé con mi experiencia de autoguiado. Sin embargo no estaba dispuesto a aceptar esta respuesta, de modo que comencé una búsqueda personal para comprender exactamente que ocurría y por qué. Comencé haciendo registros de guiado de cada sesión fotográfica. Tracé y analicé literalmente cientos de horas de registros de guiado. A medida que conseguí una mejor comprensión de lo que ocurría, y quizás más importante, por qué ocurría, fui capaz de cambiar mi configuración y mis parámetros de guiado para alcanzar unos resultados de guiado consistentemente mejores. No pretendo ser un experto, solo alguien que ha ocupado un tiempo considerable en el tema..
Escribo este artículo para documentar lo que he aprendido e intentar desmitificar el proceso de alcanzar unos resultados de autoguiado consistentemente exitosos, en la esperanza de que será de ayuda a otros para poner a punto sus habilidades en el autoguiado. Muchos han contribuído a mi desarrollo en el conocimiento y disfrute de esta afición. Para mi, esta es una oportunidad de devolver algo.
El formato de este artículo se construye secuencialmente desde el principio hasta el final. Proporciono unos breves fundamentos y entonces desarrollo una serie de ideas, profundizando en una teoría. Basandome en estas ideas y teorías establezco algunos “hallazgos importantes” y “principios de guiado”. Entonces tomo estos hallazgos y principios para proporcionar recomendaciones específicas de guiado. Este artículo no intenta resolver ninguna cuestión sobre la mecánica de las monturas, como no sea enfatizar la importancia de corregir sus fallos.
Parte primera:
Fundamentos teóricos
1. Visión general
¿Qué es el autoguiado? Dicho simplemente, el autoguiado intenta “fijar” la posición de la estrella guía, de modo que la montura rastree perfectamente el cielo. El resultado es una imagen con hermosas estrellas redondas.
¿Qué significa esto? A medida que la Tierra gira, las estrellas se mueven constantemente en el cielo. El eje de AR de la montura está diseñado para rotar a esta velocidad. Cuando el eje de AR está alineado exactamente perpendicular al eje de la Tierra, el eje de DEC no requiere de ningún movimiento para permanecer alineado sobre la estrella guía (excepción hecha de la refracción).
En la medida en que la montura no está perfectamente alineada con el eje de la Tierra y/ola montura no es mecánicamente perfecta, es inevitable la necesidad de hacer correcciones de guiado.
¿Cómo trabaja? La esencia del proceso de guiado funciona de la siguiente manera:
- Toma una imagen con la cámara guía.
- Determina la posición de la estrella guía (esto es, del centroide de la estrella guía).
- Toma otra imagen de guiado.
- Determina de nuevo el centroide de la estrella guía.
- Mueve la montura del modo necesario para alinear el centroide de la segunda estrella guía con el de la primera.
- Repite el proceso, siempre alineando respecto al centroide de la primera estrella guía.
Si esto es tan fácil, ¿por qué parece tan difícil conseguir un buen guiado? Mi opinión es que en este proceso hay errores específicos fundamentales que causan que el guiado sea demasiado cambiante. Estos errores son el primer hallazgo importante:
- La montura puede no reaccionar físicamente de forma precisa al modo en que se le ordena.
- El proceso entero es reactivo. La orden de guiado calculada reacciona a algo que ocurrió en el pasado y será aplicada en algún momento del futuro. En el momento en que la montura finaliza realmente su movimiento corrector, es poco probable que la requerida corrección de guiado sea de la cantidad correcta.
- El cambio en el centroide de la estrella guía puede o no representar la cantidad real de corrección de guiado que necesita ser aplicada a la montura.
2. Profundizando en la teoría.
Vamos a explorar cada uno de estos hallazgos un poco más y alcanzar tres principios generales de guiado.
Después de que sea aplicado algún tipo de proceso para determinar qué corrección va a ser enviada a la montura, ésta puede no moverse físicamente como se le ordena. El ejemplo más obvio de esto es la holgura de DEC. Virtualmente todas las monturas con engranajes exhiben alguna cantidad de holgura cuando se revierte la carga sobre el engranaje. La implicación es que la montura puede no responder inmediatamente a la corrección de guiado. Generalmente esto no es demasiado problema a causa de que el siguiente ciclo de guiado detectará la necesidad de aplicar de nuevo la misma corrección. Eventualmente, la montura responderá. En la medida en que este proceso no sea demasiado prolongado, la imagen final no estará corrida. Sin embargo a veces el motor de la montura aplica la corrección a los engranajes, pero el eje no responde, esto es, hay algo que restringe el movimiento del eje (fricción, impulso, rozamiento, cables colgantes, etc). En este caso, la energía se almacena en algún lugar del tren de engranajes de la montura, y eventualmente acabará liberandose. Cuando el eje finalmente se mueve, sobrecorregirá. Esto lleva a oscilaciones.
Como un comentario aparte, esto es probablemente el beneficio principal de la unidad AO7 de SBIG. Ya que las correcciones se aplican a un espejo pequeño y de baja masa en vez de a un conjunto de alta masa tubo/montura, cámara, es más probable que las correcciones sean muy exactas bajo casi todas las condiciones. Esto elimina virtualmente el primer error fundamental en el proceso de guiado. Sin embargo este artículo va a mejorar el guiado tradicional, de modo que en lo sucesivo no aconsejaré guiar con un AO7.
Ya que la montura puede no reaccionar físicamente y de modo preciso al modo en que se le ordena y al hecho de que el proceso entero es reactivo, es de sentido común que cuanto menor número de correcciones de guiado se realicen, mejor.
Este es el primer principio: esforzarse en configurar el sistema de modo que necesite el mínimo número posible de correcciones de guiado. Este principio dirige el primer y el segundo de los errores fundamentales del proceso de guiado. Más tarde discutiremos como conseguir esto.
El tercer error fundamental, el hecho de que el cambio en el centroide de la estrella guía puede o no representar la cantidad real de correcciones de guiado que necesitan ser aplicadas a la montura, es quizás el tema más interesante a tratar. El desplazamiento del centroide entre dos ciclos de guiado puede obedecer a causas diversas. Consideremos qué tipo de errores pueden ser capturados comparando los centroides de dos exposiciones de guiado consecutivas:
- Cualquier anomalía en el sistema – por ejemplo: movimiento causado por cables colgantes, caída del espejo, flexión de la cámara/montura, etc.
- Deriva (debida a un mal alineamiento polar).
- Error periódico (PE).
- Errores inducidos por la visibilidad o turbulencia atmosférica (seeing)
La corrección de los errores 1) al 3) son el objetivo del autoguiado, pero el error 4) es una falsa alarma cuya corrección generará un error de guiado. Ignoraremos 1) por el momento, ya que el primer principio requiere que estas cuestiones sean minimizadas o eliminadas antes de que se conviertan en errores que necesiten ser corregidos por el guiado.
¿Cómo son de grandes estos errores? En cualquier montura que esté razonablemente bien alineada en modo polar, la cantidad de deriva será pequeña y solo en una dirección, del orden de 0.05 arcsec/seg o menos. Por lo tanto, para un segundo ciclo de guiado, la deriva en DEC debe ser menor de 0.1 arcsec. A este ritmo, en el curso de una exposición de 5 minutos la deriva en DEC puede alcanzar los 15 arcsec.
Una montura con una PEC (Corrección del Error periódico) bien programada puede reducir el error periódico (EP) a +/- 1 arcsec. Asumiendo que este tránsito pico-valle puede ocurrir en un minuto, implica que el máximo EP entre exposiciones de guiado para un ciclo de guiado de 2 segundos es de 0.067arcsec.
Claramente la deriva y el EP necesitan ser corregidos en la medida en que afectarán a los resultados de la imagen para todas las exposiciones menos para las más cortas.
La turbulencia atmosférica (seeing) es bastante variable y depende de muchos factores. Probablemente es seguro afirmar que la mayoría de nosotros obtiene imágenes en condiciones atmosféricas menos que ideales. La turbulencia causará generalmente que la posición de la estrella oscile alrededor de un punto. A continuación vemos un gráfico de la turbulencia típica en mi lugar de observación, que normalmente alcanza un FWHM de unos 3 arcsec:
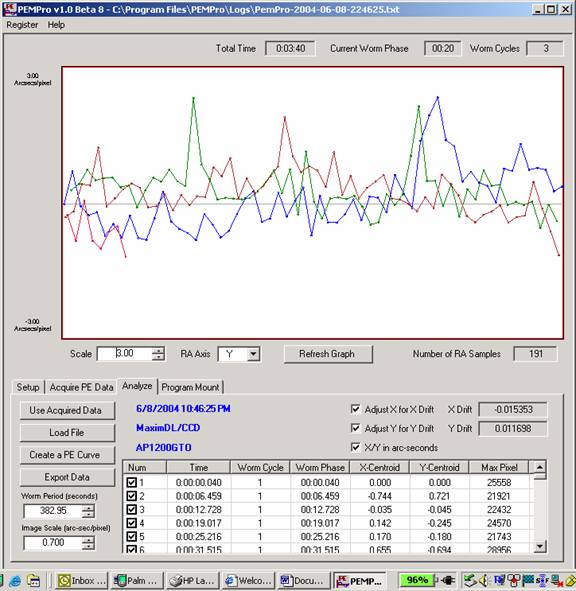
Cada línea de color representa el ciclo de un bisinfín de una montura AP1200 GTO (6 minutos, 23 segundos). Cada punto representa un ciclo de guiado de 2 segundos (1 segundo de exposición, un segundo de intervalo). Los datos han sido corregidos para cualquier deriva en DEC (0.012 arcsec/segundo en este caso). Como muestra el gráfico, la turbulencia varió en esta noche típica hasta 2 arcsec entre cualquier par de exposiciones de guiado, y lo hizo bastante a menudo.
Sumarizando los diversos tipos de error que el sistema de guiado puede detectar para un ciclo de guiado de 2 segundos:
- Deriva 0.10 arcsec o menos
- EP 0.067 arcsec o menos
- Turbulencia 2.0 arcsec o menos
Las implicaciones para el guiado de estos números son muy significativas. Este es el segundo hallazgo importante: los errores que necesitan ser corregidos (EP y deriva) pueden ser 20 veces más pequeños que los errores que no deben ser corregidos (turbulencia) en cualquier ciclo dado de guiado.
Si las correcciones de guiado se realizan de modo que sigan la posición de la estrella guía y ésta oscila con la turbulencia, la imagen acabará apareciendo corrida por la amplitud de las oscilaciones de la turbulencia.
Este es el segundo principio: hay que hacer lo que sea posible para no capturar la turbulencia. Discutiré esto mejor más tarde.
3. Profundizando seriamente en la teoría.
Pienso que es útil situar el guiado en una perspectiva que utilice unos términos familiares para todos los que obtenemos imágenes: la razón señal/ruido (S/R). Usaré el concepto de S/R de tres maneras diferentes. La primera es el modo tradicional, al que llamaré “Razón S/N de la Estrella Guía”. La estrella guía necesita ser suficientemente brillante para que el algoritmo de determinación del centroide sea preciso. Alcanzar una alta razón S/R de la Estrella Guía es una función del brillo de la estrella y del tiempo de exposición. Mi experiencia es que MaxIm es capaz de guiar sobre estrellas con tiempos de exposición que producen imágenes de guiado demasiado ruidosas. El resultado es que el centroide detectado no es siempre preciso. Cuando exista duda, debemos incrementar el tiempo de exposición o elegir una estrella guía más brillante.
El segundo uso de S/R no es en absoluto una definición tradicional. Sin embargo pienso que es un modo extremadamente útil de entender las cuestiones del guiado y es la base para buena parte del resto de este artículo. Defino la “razón S/R de Guiado” del siguiente modo:
Señal = cambios del centroide detectado que necesitan ser corregidos (EP/deriva)
Ruido = cambios del centroide detectado que no deben ser corregidos (turbulencia)
Este es el tercer hallazgo importante: dadas las cifras expuestas antes referidas a los tipos y cantidades de los errores detectados, la razón de Guiado S/R para una exposición de guiado individual será probablemente muy pobre. Todavía peor, no conocemos qué exposiciones de guiado tienen una alta S/R de Guiado y cuáles tienen una baja S/R de Guiado.
La siguiente cuestión lógica es, ¿se puede mejorar esta situación?, esto es, ¿podemos mejorar la razón S/R de Guiado? Como con cualquier razón, hay pocas elecciones: aumentar el numerador, disminuir el denominador o ambas. Consideremos la señal de guiado. Ésta puede ser aumentada de dos maneras:
- Incrementando la cantidad de error por ciclo de guiado. Por desgracia esto es completamente contrario al primer principio: minimizar el número/cantidad de correcciones de guiado requeridas, y es claramente no deseable.
- Aumentar la cantidad de tiempo por ciclo de guiado. Esto incrementará el tamaño de los errores detectados que necesitan ser corregidos que necesitan ser corregidos por ciclo de guiado. Sin embargo existe una ley, la ley de los rendimientos decrecientes, que en economía determina que la inversión realizada para aumentar la producción tiene un tope a partir del cual el esfuerzo realizado no es rentable. Aplicada a nuestro caso, si el tiempo entre correcciones es demasiado largo, la imagen se correrá.
Consideremos ahora reducir el ruido de guiado. Hay dos maneras lógicas de reducirlo:
- Mejorar los algoritmos de determinación del centroide de modo que puedan diferenciar entre los errores debidos a la turbulencia y otros tipos de error. En otras palabras, filtrar los efectos de la turbulencia de los cálculos del centroide de la estrella guía. Desafortunadamente esta idea no es actualmente empleada en ninguno de los programas de guiado. Además, no es claro cómo podría ser implementada incluso si la idea fuera acogida. (aunque, dada su importancia, pienso que este puede ser un tema que vale la pena).
- Incrementar le exposición de guiado. La idea es que una exposición de guiado más larga reducirá las variaciones de la turbulencia por ciclo de guiado. De nuevo está aquí presente la ley de los rendimientos decrecientes. La amplitud de las variaciones de la turbulencia es sorprendentemente grande incluso cuando el tiempo de exposición se incrementa dramáticamente. Para tener un significativo efecto sobre la S/R de Guiado, las exposiciones de guiado necesitan ser del orden de 10+ segundos antes de que las variaciones de la turbulencia (esto es, el ruido de guiado) comiencen a compensar el EP/deriva (esto es, la señal de guiado).
El cuarto hallazgo importante: incrementar la exposición de guiado mejorará la S/R de Guiado, pero aquí interviene la ley de rendimientos decrecientes.
¿Qué ocurre con otras anomalías físicas? Aunque es crítico eliminarlas, no es muy probable que podamos acabar completamente con ellas. Estas anomalías físicas pueden generar casi cualquier tamaño de error, pero es más probable que sea grande que pequeño. Otro tema es que a veces estos errores necesitan ser corregidos y otras veces no. Consideremos algo físicamente cambiante en la configuración del sistema, por ejemplo, la caída del espejo. Una vez ocurre, el error permanecerá hasta que sea subsanado. Por lo tanto, necesita ser corregido mediante el guiado. Sin embargo, en el caso de un golpe de viento el error solo será momentáneo, por lo que no precisará ser corregido.
Esta discusión lleva al tercer principio: es mejor pecar por usar exposiciones de guiado largas que cortas. Para la mayor parte de las configuraciones, la S/R de Guiado probablemente será bastante baja para todas o casi todas las exposiciones de guiado. Incrementar la duración de la exposición de guiado la mejorará. El compromiso está en tener la capacidad de corregir errores de guiado amplios y rápidos causados por anomalías físicas, y a su vez no hacer correcciones tan a menudo y mejorar la razón S/R de guiado.
De esta discusión se pueden obtener unas cuantas conclusiones interesantes, que constituyen el quinto hallazgo importante:
- Cuando la turbulencia es muy escasa la razón S/R de guiado será relativamente alta, lo cual permitirá una exposición de guiado más corta.
- Si la configuración del sistema es susceptible de anomalías físicas y/o el EP y la deriva son excesivas, la razón S/R será relativamente alta, permitiendo una exposición de guiado más corta. Realmente, pueden ser necesarias exposiciones de guiado más cortas para mantener el error de la montura por ciclo de guiado lo bastante pequeño para que las correcciones de guiado puedan seguir adelante pese a los errores. No insinúo que esta sea una buena estrategia de guiado. Dicho de otra manera, no hay que salir corriendo a comprar una mala montura para mejorar la razón S/R de Guiado.
- Si la montura es muy buena, con bajo EP y un excelente alineamiento polar, la razón S/R de guiado será baja, y probablemente nos beneficiaremos de utilizar exposiciones de guiado más largas para mejorar la razón S/R de Guiado.
La mayoría de las configuraciones probablemente representan una combinación de estos factores básicos que afectan a la razón S/R de Guiado. Por ejemplo, una buena montura en excelentes condiciones atmosféricas guiará con éxito tanto con exposiciones largas como cortas. De cualquier modo la razón S/R de Guiado será razonablemente alta. Sin embargo una montura pobre utilizada en un cielo en malas condiciones probablemente lo pasará mal. La razón S/R de guiado puede ser mejorada alargando la exposición de guiado, de modo que los errores por ciclo de guiado puedan ser mantenidos por debajo de un nivel aceptable. Bajo malas condiciones atmosféricas, incluso una montura excelente guiará mal si no configuramos el sistema para minimizar la captura de la turbulencia.
Por si mismas, estas conclusiones no son particularmente revolucionarias. Es intuitivamente obvio que con buenas monturas en buenas condiciones de visibilidad será más sencillo guiar bien. A la inversa, con malas monturas en malas condiciones es casi imposible guiar correctamente. Sin embargo pienso que es muy útil entender los detalles de porque son ciertas estas obvias afirmaciones. Valorando las cuestiones que limitan el éxito del guiado, podemos dirigir punto por punto para mejorar los resultados globales del guiado.
4. Recomendaciones de guiado. Casi listos para aplicar la teoría
Vale la pena revisar de nuevo el proceso de guiado, los pasos del 2 al 5:
2) Determinar la posición de la estrella guía, esto es, el centroide de la estrella guía.
3) Tomar otra imagen de guiado.
4) Determinar el centroide de la estrella guía.
5) Mover la montura lo necesario para alinear el centroide de la segunda estrella guía con el primero.
Vamos a situar estos puntos bajo la perspectiva de la S/R de Guiado. En una situación ideal, de debe enviar la corrección completa a la montura en todos los ciclos con alta razón S/R de Guiado, mientras que todos los ciclos con baja razón S/R de Guiado deben ser ignorados. Sin embargo, la razón S/R de Guiado en cualquier exposición de guiado dada es desconocida, aunque probablemente será pobre. Dicho de un modo más convencional, es más probable que domine la turbulencia que el sistema consiga detectar los cambios del centroide. El envío de estas cantidades brutas de corrección a la montura sin manipulación casi siempre resultará en oscilaciones e imágenes corridas.
El sexto hallazgo importante y quizás el más importante que debemos conocer: no hay modo de determinar si los cambios detectados se basan en una alta Señal de Guiado o en un alto Ruido de Guiado. Por lo tanto, las correcciones serán indiscriminadamente elaboradas para ambos. No hay otra opción. Afortunadamente, entre los pasos 4) y 5) existe la oportunidad de determinar qué cantidad del cambio detectado en la posición de la estrella guía es realmente enviada a la montura como corrección. Hecho apropiadamente, los efectos de corregir el ruido pueden ser minimizados.
5. Un último paso en la teoría
Es útil dar un paso más en el uso del concepto de razón S/R. en el proceso de guiado. El tercer uso de S/R es incluir la montura. Defino la “razón S/R de Guiado de la Montura” como:
Señal de guiado de la montura = el movimiento de la montura (arcsec)
hace lo que debe ser hecho
Ruido de guiado de la montura= el movimiento de la montura (arcsec)
hace lo que no debería hacer
El séptimo hallazgo importante: para alcanzar los mejores resultados de guiado, el objetivo es maximizar la razón S/R de Guiado de la Montura. De nuevo, para conseguir esto podemos aumentar el numerador, disminuir el denominador o ambos. Para una configuración física dada, una vez determinamos la duración de la exposición de guiado, el numerador es fijo. Por lo tanto debemos reducir el denominador para mejorar la razón S/R de Guiado de la Montura. dicho de otra manera, el objetivo es minimizar el número de malas correcciones o minimizar el efecto de hacer malas correcciones.
Parte segunda:
Aplicando la teoría a la ejecución del guiado. Recomendaciones de guiado
1. Recomendaciones básicas
Claramente hay varios desafíos para alcanzar unos resultados de guiado consistentes. Pienso que hay tres recomendaciones básicas de guiado que se deben seguir:
1. Resuelve todos los problemas físicos posibles.
Resuelve cualquier anomalía física en la configuración que pueda causar problemas de seguimiento. Ejemplos son: cables flojos o colgantes, malas conexiones mecánicas entre dos componentes cualesquiera (montura, tubo, tubo guía, cámaras), mala mecánica de la montura, soplos de viento, etc.).
2. Minimiza la necesidad de hacer correcciones de guiado en la medida de lo posible.
a) Alineamiento polar de la montura. Cuanto mejor sea el alineamiento, menor será el número de correcciones de guiado requeridas debidas al mal alineamiento polar.
b) Minimiza el error periódico de la montura mediante el entrenamiento de la PEC (corrección del error periódico). Cuanto más bajo sea el EP, menor el número de correcciones de guiado debidos al EP.
c) Maximiza la razón S/R de Guiado de la Montura.
2. Como alcanzar la mejor razón S/R de Guiado de la Montura
Una vez la configuración física ha sido optimizada, debemos alcanzar la mejor razón S/R de guiado de la montura. Para hacer esto, los parámetros de guiado del software deben ser configurados para minimizar el número de correcciones de guiado debidas al ruido, y/o minimizar sus efectos. Recomendaciones específicas de guiado:
- Asegurate de que la razón S/R de la estrella guía es suficiente, de modo que el cálculo del centroide sea consistentemente preciso.
- Optimiza primero la razón S/R de guiado. Esto ha sido discutido antes extensamente. Resumiendo: elige una exposición de guiado que sea suficientemente larga para maximizar la razón S/R de Guiado y suficientemente corta para enviar las correcciones de guiado suficientemente a menudo.
- Minimizar el Ruido de Guiado de la Montura. Esto es, reducir el denominador de la razón S/R de Guiado de la Montura. El objetivo es llegar a una configuración de parámetros de guiado que minimice los efectos de hacer malas correcciones.
Yo uso MaxIm DL, de modo que comentaré específicamente este programa. Sin embargo la mayoría de los programas de guiado incluyen parámetros de configuración semejantes. Los parámetros de configuración en MaxIm DL que pueden reducir el denominador del Ruido de Guiado de la Montura son:
- Agresividad: cuánto del movimiento calculado se aplica (10 = 100%, 0 = 0%).
- Movimiento máximo: el movimiento calculado más grande que puede ser aplicado.
- Movimiento mínimo: el movimiento calculado más pequeño que será aplicado
Los Movimientos Máximo y Mínimo están en segundos, por ejemplo, 0.100 representa un pulso de 100 milisegundos enviado a la montura. A una velocidad de guiado de 1x sidérea, esto representa un movimiento de 1.5 arcsec.
¿Cómo usar los parámetros de guiado? Es útil pensar en términos de probabilidades, esto es, ¿cuál es la probabilidad de que la corrección de guiado calculada sea correcta? Probablemente no sea muy alta, ya que la razón de S/R de guiado para cualquier ciclo de guiado es probable que sea baja. ¿Cuál es la consecuencia si yo envío la orden de guiado completa?
- Si la razón S/R de guiado para la exposición es alta, la corrección de guiado que se envía será correcta, aunque reactiva. Asumiendo que la montura responda correctamente, esta es la mejor situación posible.
- Si la razón S/R de Guiado para la exposición es baja, hay dos posibilidades:
a) La corrección de guiado emitida es excesiva. Esto ocurre cuando el ruido es sustancialmente más alto que la corrección requerida (lo cual ocurre la mayor parte de las veces). En este caso, la sobrecorrección en una dirección requerirá otra corrección en la dirección opuesta en el siguiente ciclo de guiado. Sin embargo el nuevo ciclo de guiado también tendrá probablemente una baja razón S/R de guiado, lo cual dará lugar a unos resultados impredecibles. Más que probablemente, esto dará lugar a otra sobrecorrección en la dirección opuesta. El resultado es la oscilación. Esto es particularmente cierto cuando las variaciones de la turbulencia son grandes y el EP y/o la deriva son pequeños.
b) La corrección de guiado emitida no es suficiente. Esto ocurre cuando la corrección deseada está contrarrestada por el ruido. De nuevo, se requerirán ulteriores ciclos de guiado con desconocidas aunque probablemente pobres razones de S/R de Guiado. Más que probablemente comenzará el proceso de oscilación en el tercer ciclo de guiado en vez de en el segundo.
3. Configuración de la agresividad
Consideremos las implicaciones de reducir la agresividad. En otras palabras, ¿qué ocurre si solo una porción de la corrección requerida, digamos un 50%, es enviada a la montura?
- Si la razón S/R de Guiado para la exposición es alta, las correcciones de guiado enviadas serán insuficientes (infracorrección). En este caso se requerirá el envío de otra corrección en la misma dirección en el siguiente ciclo de guiado. Sin embargo, la razón S/R de Guiado para el siguiente ciclo es desconocida. Si es alta, todavía habrá una infracorrección en la siguiente orden, aunque menor que en la anterior.
- Si la siguiente razón S/R de Guiado es baja, probablemente comenzará un proceso iterativo oscilando como antes. Sin embargo, en este caso el tamaño de cualquier oscilación se reduce en un 50%. En otras palabras, el tamaño del Ruido de Guiado de la Montura se ha reducido en un 50%., mejorando por tanto la razón S/R de la montura por un factor de 2. Este es un resultado muy significativo y deseable.
Reducir el tamaño de las potenciales oscilaciones en el guiado es extremadamente importante. Recomendación Específica del Parámetro de Guiado: configurar la Agresividad relativamente baja reduce considerablemente el potencial de oscilación causado por una baja razón S/R de guiado. La infracorrección no es un problema significativo, pues los ciclos de guiado no son lo bastante largos como para impedir que la mayoría de los movimientos de guiado requeridos no puedan ser conseguidos en unos pocos ciclos de guiado.
4. Configuración del Movimiento Máximo permitido
Esta orden es también usada para reducir el potencial para la oscilación. La mayoría, y con suerte todos los cambios amplios en el centroide de la estrella guía, son el resultado de bajas razones de S/R de Guiado, esto es, la turbulencia domina sobre el EP y/o la deriva. Por lo tanto, si limitamos los movimientos amplios disminuyendo el valor del Movimiento Máximo permitido, el Ruido de Guiado de la Montura se reducirá de un modo efectivo para cualesquiera ciclos de guiado donde se detecten amplios cambios en la posición del centroide de la estrella guía. Recomendación Específica del Parámetro de Guiado: configura los parámetros de Movimiento Máximo permitido tan bajos como sea posible para la configuración física. Donde esto puede ser un problema es cuando ocurren errores muy grandes que necesitan ser corregidos, esto es, cuando la razón S/R de Guiado es alta debido a que ha ocurrido una importante anomalía física y el error debe ser corregido. En este caso, hacer la corrección puede tomar un buen número de ciclos de guiado, resultando en una imagen corrida. Esta es la razón principal para minimizar cualquier anomalía física que pueda requerir grandes correcciones. Dicho de otra manera, cuanto mejor sea la calidad de la montura/configuración, más bajo puede ser este parámetro.
5. Configuración del Movimiento Mínimo corregido
De igual modo, los pequeños cambios en el centroide de la estrella guía es más probable que sean el resultado de variaciones en la turbulencia que en el EP y/o la deriva. Por tanto, si estos movimientos son ignorados se incrementará la razón S/R de Guiado. Recomendación específica del parámetro de guiado: ignorar las correcciones que sen mucho más pequeñas que las variaciones de la turbulencia. Esto apoya el primer principio: minimizar el número de correcciones de guiado a realizar. Usado en conjunto con una agresividad relativamente baja, es una manera muy efectiva de minimizar las oscilaciones causadas por la captura de la turbulencia. Obviamente, fijar este parámetro demasiado alto causará que el guiado ignore correcciones que necesitan ser hechas.
La otra consideración con esta orden es determinar cómo de pequeño es el error al que la montura es probablemente capaz de responder de forma precisa y consistente. Ajustar la configuración a cualquier nivel inferior a éste causará que el guiado sea inconsistente.
El ajuste correcto del parámetro de Mínimo Movimiento corregido mejorará dramáticamente el guiado minimizando correcciones innecesarias que probablemente causarían oscilaciones. Esto es particularmente importante para el eje de DEC, donde la holgura puede ser un problema. El hallazgo del ajuste correcto probablemente requerirá alguna experimentación.
6. Ajuste de Compensación de la Declinación
El ajuste de la compensación de la DEC intenta mantener la misma cantidad de movimiento en AR en relación al cielo independientemente de dónde esté apuntando la montura en DEC. Para una cantidad dada de corrección de guiado dirigida al eje de AR con DEC = 0, la cantidad de movimiento relativa al cielo se hace más pequeña a medida que la DEC aumenta moviendose hacia el polo. Cuando se apunta directamente hacia el polo, la montura permanecerá fija en AR independientemente de la cantidad de movimiento aplicada al eje de AR.
Vamos a poner la compensación de la DEC en el contexto de la S/R de Guiado, en este caso la S/R de la montura. El EP es función de anomalías físicas predecibles de la montura. La variación del EP en términos de micras de movimiento en el eje de AR de la montura es fija en cualquier punto del ciclo del engranaje. Por lo tanto, la corrección de guiado requerida para compensar el EP es también fija. Esto es cierto independientemente de dónde apunte la montura. Dicho de otra manera, el EP es una función de las características físicas de la montura. No tiene nada que ver con el cielo.
Sin embargo, el impacto del EP en términos de movimiento de un centroide de la estrella guía cambia dependiendo de dónde apunta la montura. El efecto del EP se hace más y más pequeño a medida que nos acercamos al polo, mientras que el efecto de la turbulencia sigue siendo el mismo. Por lo tanto, la razón S/R de Guiado se hace más y más baja a medida que el polo está más cercano.
En términos de S/R de Guiado de la Montura, la señal de Guiado de la Montura disminuye a medida que el polo se acerca, por lo que la S/R de Guiado disminuye. Para conservar la misma razón S/R de Guiado de la montura, el Ruido de Guiado de la Montura también debe descender. Esto es llevado a cabo automáticamente sin hacer ajustes sobre el movimiento de la montura en el eje de AR a medida que la DEC cambia, esto es, la capacidad de la montura para responder al ruido de la turbulencia disminuye naturalmente a medida que nos acercamos al polo.
Consideremos qué ocurre cuando la compensación de la DEC está en funcionamiento. A medida que nos aproximamos al polo, cada corrección del eje de AR se aumenta en la cantidad necesaria para asegurar que todos los cambios detectados en el centroide muevan la montura lo suficiente para corregirlos. En otras palabras, el cambio está asegurando que la montura se mueva de manera que pueda corregir el ruido, esto es, capturar la turbulencia. El resultado probable es la oscilación en AR.
En términos teóricos, si las razones de S/R de Guiado son relativamente altas, aplicar la compensación de la DEC puede no causar problemas significativos, particularmente si el parámetro de Movimiento Máximo es un factor limitante. Pero a la inversa, con razones S/R de Guiado relativamente bajas, la compensación de la DEC probablemente causará oscilaciones en AR. Dicho de otro modo, buenas monturas en malas condiciones de turbulencia probablemente guiarán mejor con la Compensación de la DEC desconectada, mientras que malas monturas en buenas condiciones de visibilidad pueden no ser afectadas casi nada por este parámetro.
Recalibrar el sistema para diferentes objetivos cuando cambia la DEC es exactamente lo mismo que conectar la Compensación de la DEC, y por tanto será igualmente inconveniente. Recomendación Específica del Parámetro de Guiado: calibrar el sistema de guiado con una estrella en DEC = 0 y no recalibrarlo independientemente del objetivo. Desconectar la compensación de la DEC completamente.
Reconozco que ésta es probablemente mi recomendación más controvertida. Afortunadamente, este fenómeno es relativamente fácil de detectar. Calibra tu sistema con una DEC = 0. Guía a DEC = 0 y a DEC = 60 con la compensación de la DEC conectada y desconectada. Analizando los registros de guiado debe queda claro si conectar la compensación de la DEC ayuda o perjudica a los resultados del guiado. Aplica lo que mejor funcione para la configuración específica.
Para tu información, en MaxIm DL, la compensación de la DEC se conecta siempre que haya un valor que no sea 0 en el campo Scope Dec del cuadro de guiado. Esto ocurre independientemente de si la Compensación de la DEC está activada o no. En la Suite ACP3 (que comprende MaxIm DL/CCD y otros programas), a menos que la Compensación de la DEC sea explícitamente desactivada mediante el archivo GuiderSetting.txt, la Compensación de la DEC se activa independientemente de la configuración de MaxIm.
7. La importancia de una buena PEC
En el desarrollo de la discusión sobre la razón S/R de guiado, he usado el ejemplo de una montura con un buen comportamiento de EP. En otras palabras, el EP es relativamente pequeño y ocurre de un modo relativamente regular en el tiempo. Consideremos el caso en que el EP sea amplio (>10 arcsec) y las variaciones ocurran rápidamente (dentro de 10 segundos o menos) una o dos veces en el ciclo de un engranaje. Esto implica que para la mayoría de los ciclos de guiado el EP es pequeño, pero para unos pocos ciclos es muy grande. Esta es la razonable representación de muchas monturas, y en particular del LX200. Poniendo esto en una perspectiva de razón S/R de Guiado, durante la mayor parte del tiempo la razón S/R de Guiado es baja. Sin embargo para unos pocos ciclos, la S/R de Guiado es alta a causa de que la corrección requerida (Señal de Guiado) es muy alta, quizás incluso mayor que las variaciones de la turbulencia (Ruido de Guiado).
De nuevo, el problema es que no hay modo de determinar qué ciclos de guiado tienen una alta razón S/R de Guiado y cuáles la tienen baja. Si los parámetros de guiado son configurados para trabajar con la típica situación de S/R de Guiado, esto es, cuando es baja, es dudoso que las correcciones de guiado sean lo bastante oportunas y amplias para corregir un EP amplio y rápido. El resultado es un corrimiento de la imagen en AR. Si los parámetros de guiado son configurados para atender a un EP amplio y rápido, esto es, cuando la S/R de Guiado es alta, cuando la S/R de Guiado sea baja casi con seguridad se capturará la turbulencia. El resultado puede producir estrellas redondas, pero estarán hinchadas.
Incrementar el comando de Máximo Movimiento puede ser de alguna ayuda en esta situación, pero el resultado probablemente no será satisfactorio. La mejor solución es reducir el EP vía PEC. O, de nuevo, poner en práctica el primer principio de ajustar la configuración de modo que minimicemos el número de correcciones de guiado necesarias.
8. ¿Qué hace dar por buenos los registros del guiado?
Para mejorar los resultados del guiado, es de la mayor importancia salvar los registros de seguimiento y analizarlos.
Hallazgos importantes finales: Las características de los registros de un buen guiado son:
1) No hacer correcciones del guiado que estén dentro de los límites de la turbulencia. El resultado es que habrá un número satisfactorio de ciclos de guiado en los que no se requerirá enviar ninguna corrección a la montura. Esto implica que la razón S/R de Guiado está ajustada correctamente.
2) Oscilaciones mínimas, esto es, solo hay una o dos correcciones en la misma dirección antes de volver al estado e en que no es necesario hacer correcciones. Esto implica que la razón S/R de la montura está ajustada correctamente.
3) Si hay correcciones en direcciones opuestas para una serie de ciclos de guiado consecutivos, hay demasiadas oscilaciones. En otras palabras, la razón S/R de Guiado de la Montura es demasiado baja, a causa probablemente de la captura de la turbulencia. Intenta incrementar la razón S/R de Guiado incrementando la exposición de guiado. O intenta disminuir el Ruido de Guiado de la Montura disminuyendo la configuración de la Agresividad, incrementando el Movimiento Mínimo o disminuyendo el Movimiento Máximo.
4) En DEC debe solo haber correcciones ocasionales en una dirección para compensar la deriva. La holgura en DEC exacerba cualquier problema de oscilación. Si hay muchas oscilaciones en DEC, la razón S/R de la montura es demasiado baja. Esto está probablemente causado por la captura de la turbulencia. Intenta incrementar la razón S/R incrementando la exposición de guiado. O intenta disminuir el Ruido de Guiado de la Montura disminuyendo el valor de la Agresividad, incrementando el Movimiento Mínimo o disminuyendo el Movimiento Máximo.
5) Si se producen varias correcciones en la misma dirección antes de volver al estado en que no es necesaria ninguna corrección, significa que existe una razón S/R de Guiado relativamente alta, pero una razón S/R de Guiado de la Montura relativamente baja. En otras palabras, podemos incrementar el número de ciclos de guiado en que se realiza una corrección (por ejemplo disminuyendo el Movimiento Mínimo) o incrementar la cantidad de corrección por ciclo de guiado (por ejemplo incrementando la Agresividad o el Movimiento Máximo).
6) Si ocasionalmente se requieren correcciones que son muy grandes, la causa más probable es alguna anomalía física de la configuración, y esta causa debe ser eliminada. Es extremadamente difícil alcanzar unos buenos resultados de guiado bajo estas condiciones a causa de que la mayor parte de las configuraciones de guiado están diseñadas para minimizar la captura de la turbulencia, esto es, no realizando movimientos indeseados demasiado grandes respecto a los pequeños movimientos deseados. Cuando se requiere un movimiento grande, no hay otro modo de llevarlo a cabo que realizando varios ciclos de guiado para terminarlo. El resultado es probablemente una imagen corrida (ver también la discusión respecto al PEC más arriba).
9. Ejemplos de Gráficos de Registro de Guiado
Estos dos gráficos representan todas las correcciones en AR y DEC hechas durante una exposición de 10 minutos (exposición de guiado = 1 segundo). Son tan buenas como puede esperarse: casi sin oscilaciones, casi sin captura de la turbulencia, sin grandes anomalías físicas, y la mayoría de los ciclos de guiado no requirieron una corrección de guiado.
10. Mis parámetros de guiado
Mis parámetros de guiado son el resultado de mi configuración física y de mis condiciones típicas de turbulencia. Pueden o no ser apropiadas para otros, ya que es improbable que su situación sea idéntica a la mía. Sin embargo he incluído los detalles de mi configuración normal en este artículo para completarlo.
Montura: AP1200GTO
Tubo principal: LX200 10” F10 extensamente modificado para minimizar la caída del espejo; longitud focal = 2575 mm
Cámara de imágenes: ST8E
Escala de imagen: 0.7 arcsec/pixel
Telescopio guía: Orion 80 mm tubo corto; operando a longitud focal = 213 mm
Cámara de guiado: ST237A
Escala de la imagen de guiado: 7.12 arcsec/pixel
Turbulencia: rara vez permite una FWHM menor de 2.5 arcsec; normalmente alrededor de 3.0 arcsec
Parámetros de guiado en MaxIm:
Agresividad: 5
Movimiento Máximo: 0.1 seconds
Movimiento Mínimo: 0.040 seconds
Compensación de la DEC: off
Compensación de la Holgura en DEC (backlash): 0.60 segundos (específico para mi montura)
Exposición de Guiado: nunca menos de un segundo. Dada la corta longitud focal de mi telescopio guía, rara vez necesito incrementarla por encima de un segundo para alcanzar una razón S/R de la estrella guía suficiente. Si la turbulencia es tal que necesito incrementar la exposición por encima de un segundo para alcanzar una S/R de Guiado razonable, probablemente no es muy buena noche para hacer fotografías con una razón focal larga.
ABREVIATURAS Y TÉRMINOS:
Arcsec: segundos de arco
DEC : declinación
Backlash: holgura
Seeing: turbulencia
FWHM: full width at half máximum







